מהו מנוע סינכרוני ואיפה משתמשים בו
מנועים חשמליים סינכרוניים (SD) אינם נפוצים כמו מנועי כלוב סנאי אסינכרוני. אך הם משמשים במקומות בהם יש צורך במומנט גדול ובמהלך העבודה תכופים להעמיס יותר מדי. כמו כן, משתמשים בסוג זה של מנוע בו יש צורך בכוח גדול בכדי להניע את המנגנונים, בגלל גורם ההספק הגבוה והיכולת לשפר את גורם ההספק של הרשת, מה שיפחית משמעותית את עלות החשמל והעומס בקו. מהו מנוע סינכרוני, היכן משתמשים בו ומה היתרונות והחסרונות שנשקול במאמר זה.
הגדרה ועקרון הפעולה
במילים פשוטות, מנוע סינכרוני נקרא מנוע חשמלי בו מהירות הסיבוב של הרוטור (פיר) עולה בקנה אחד עם מהירות סיבוב השדה המגנטי של הסטטור.
הבה נבחן בקצרה את עקרון הפעולה של מנוע חשמלי כזה - הוא מבוסס על אינטראקציה של שדה מגנטי סטטורי מסתובב, שנוצר בדרך כלל על ידי זרם חילופין תלת פאזי ושדה מגנטי קבוע של הרוטור.
השדה המגנטי הקבוע של הרוטור נוצר על ידי מגנטים המתפתלים או מגנטים קבועים. הזרם בכפתורי הסטטור יוצר שדה מגנטי מסתובב, בעוד שהרוטור במצב ההפעלה הוא מגנט קבוע, מוטותיו ממהרים אל הקטבים הנגדיים של השדה המגנטי של הסטטור. כתוצאה מכך הרוטור מסתובב באופן סינכרוני עם שדה הסטטור, שהוא התכונה העיקרית שלו.
כזכור מנוע אינדוקציה מהירות הסיבוב של הסטטור MP ומהירות הסיבוב של הרוטור נבדלים זה מזה בכמות ההחלקה, והתכונה המכנית שלו "דבוקה" עם שיא במהלך החלקה קריטית (מתחת למהירות הסיבוב הנומינלית).
ניתן לחשב את המהירות בה מסתובב השדה המגנטי של הסטטור באמצעות המשוואה הבאה:
N = 60f / p
f הוא תדר הזרם המתפתל, Hz, p הוא מספר זוגות הקטבים.
בהתאם, מהירות הסיבוב של מוט המנוע הסינכרוני נקבעת על ידי אותה נוסחה.
רוב המנועים החשמליים החשמליים המשמשים בייצור מיוצרים ללא מגנטים קבועים, אך עם התרגשות מתפתלת, ואילו מנועי AC הסינכרוניים בעלי הספק נמוך מיוצרים עם מגנטים קבועים על הרוטור.
הזרם המתפתל לשדה מסופק על ידי טבעות ומכלול מברשות. שלא כמו מנוע חשמלי אספן, שבו משמש אספן (סט של לוחות מסודרים לאורכיים) להעברת זרם לסליל מסתובב, טבעות מותקנות על הסינכרון מעבר לקצה האחד של הסטטור.
מרגשי ת'וריסטור, המכונים לעיתים קרובות "VTE" (בשם אחת מסדרות המכשירים הללו של ייצור מקומי) הם כיום המקור לעירוי זרם ישר.בעבר, נעשה שימוש במערכת העירור לגנרטור-מנועי, כאשר הותקן גנרטור על אותו פיר עם המנוע (זהו גם ריגול), אשר נגדים זרם מוחל על מתפתל השדה.
הרוטור של כמעט כל מנועי ה- DC הסינכרוניים מבוצע ללא מתפתל עירור, ועם מגנטים קבועים, למרות שהם דומים באופן עקרוני לנורות LED AC, הם שונים מאוד מבחינת אופן חיבורם ושליטה ממכונות תלת פאזיות קלאסיות.
אחד המאפיינים העיקריים של מנוע חשמלי הוא מאפיין מכני. היא מניעה מנועים סינכרוניים קרוב לקו אופקי ישר. המשמעות היא שהעומס על הפיר אינו משפיע על מהירותו (עד שהוא מגיע לערך קריטי כלשהו).
 מנועים אסינכרוניים וב) מנועים סינכרוניים")
זה מושג בדיוק בגלל עירור זרם ישיר, ולכן המנוע החשמלי הסינכרוני שומר בצורה מושלמת על סיבובים קבועים תחת עומסים משתנים, עומסי יתר וירידות מתח (עד גבול מסוים).
למטה רואים את הסמל בתרשים של המכונה הסינכרוני.

עיצוב רוטור
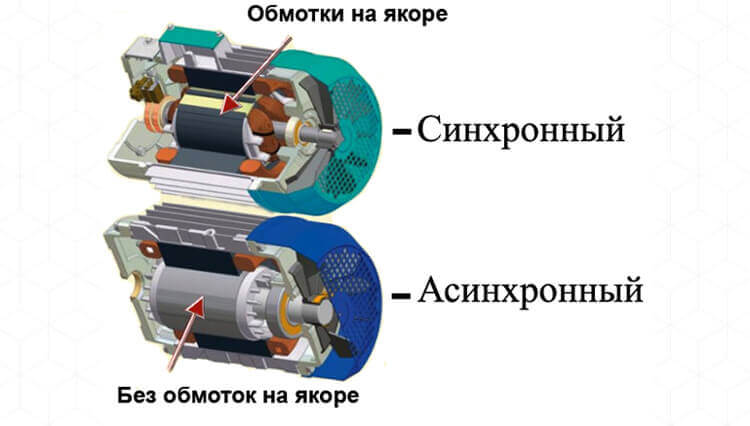
כמו כל אחד אחר, מנוע חשמלי סינכרוני מורכב משני חלקים עיקריים:
- סטטור. הפיתולים ממוקמים בו. זה נקרא גם עוגן.
- רוטור. מותקנים עליו מגנטים קבועים או מתפתל עירור. זה נקרא גם משרן, בגלל מטרתו - ליצור שדה מגנטי).
כדי לספק זרם לסלילת השדה, מותקנים 2 טבעות על הרוטור (מכיוון שהעירור הוא זרם ישר, "+" מסופק לאחת מהן, ו- "-" לשני). מברשות מחוברות למחזיק המברשות.

הרוטורים של מנועי AC סינכרוניים הם משני סוגים, בהתאם למטרה:
- קוטב מפורש. מוטות (סלילים) נראים בבירור. השתמש במהירויות נמוכות ובמספר גדול של קטבים.
- משתמע - זה נראה כמו ריק עגול, בחריץ עליו מונחים חוטי הפיתולים. השתמש במהירות גבוהה של סיבוב (3000, 1500 סל"ד) ובמספר קטן של קטבים.

התחל מנוע סינכרוני
תכונה של מכונות חשמליות מסוג זה היא שהיא לא יכולה פשוט להיות מחוברת לרשת ולהמתין להשקה שלה. בנוסף, להפעלת הנורית אין צורך רק במקור זרם העירור, יש לו גם מעגל התחלה מסובך למדי.

ההפעלה מתרחשת כמו במנוע אינדוקציה, וכדי ליצור רגע התחלה, בנוסף לסלילת השדה, מונחת על הרוטור סלילה נוספת של "כלוב הסנאי". זה נקרא גם פיתול "דעיכה", מכיוון שהוא מגביר את היציבות במהלך עומסי פתאומי.
זרם ההתעצמות בסיבוב הרוטור בעת ההפעלה נעדר, וכאשר הוא מאיץ למהירות תת-סינכרונית (3-5% פחות מסינכרון) מוחל זרם העירור שלאחריו הוא וזרם הסטטור מתנדנד, המנוע נכנס לסינכרון ונכנס למצב ההפעלה.
כדי להגביל את זרמי ההתחלה של מכונות עוצמתיות, לפעמים הם מפחיתים את המתח במסופים של פיתולי הסטטור על ידי חיבור שנאי או נגדים אוטומטיים בסדרות.
בזמן שהמכונה הסינכרונית מתחילה במצב אסינכרוני, נגדים מחוברים לסלילת השדה שההתנגדות שלהם עולה על ההתנגדות של המתפתל עצמו פי 5-10. זה הכרחי כדי שהשטף המגנטי הפועם הנובע כתוצאה מפעולה של הזרמים הנגרמים בהתפתלות במהלך ההפעלה אינו מאט את ההאצה, וגם כדי לא לפגוע בסיבובים הנגרמים כתוצאה מ- emf המושרה בו.
צפיות
ישנם המון סוגים של מכונות כאלה, העיצוב של מנוע זרם חילופין סינכרוני עם פיתולי עירור, כנפוץ בייצור, תואר לעיל. ישנם סוגים אחרים, כמו:
- מנועים סינכרוניים מגנטיים קבועים. מדובר במנועים חשמליים שונים, כגון PMSM - מנוע סינכרוני מגנט קבוע, BLDC - זרם ישר ישיר ללא מברשות ואחרים. הבדלים ביניהם מורכבים בשיטת הבקרה וצורת הזרם (סינוסואיד או טרפז). הם נקראים גם מנועים ללא מברשות או ללא מברשות.משמש בכלי מכונה, דגמים מבוקרים על ידי רדיו, כלי חשמל וכו '. הם אינם פועלים ישירות מזרם ישר, אלא באמצעות ממיר מיוחד.
- מנועי צעד - מנועים ללא מברשות סינכרוניים, בהם הרוטור מחזיק במדויק את המיקום שצוין, הם משמשים למיקום כלי העבודה במכונות ה- CNC ולבקרת אלמנטים שונים של מערכות אוטומטיות (למשל, מיקום שסתום המצערת במכונית). הם מורכבים מסטטור, במקרה זה ממוקמים עליו פיתולי ריגוש, ורוטור, העשוי מחומר רך מגנטית או קשה מגנטית. מבחינה מבנית מאוד דומה לסוגים הקודמים.
- מגיב.
- היסטריה.
- היסטריה ריאקטיבית.
לשלושת סוגי הנוריות האחרונות אין גם מברשות, הם עובדים בגלל העיצוב המיוחד של הרוטור. נוריות ריאקטיביות מבדילות שלושה מהעיצובים שלהם: רוטור מרובד לרוחב, רוטור עם קטבים ברורים ורוטור מרובד צירי. הסבר על עקרון עבודתם הוא די מסובך, וייקח כמות גדולה, לכן נשמיט אותו. מנועים כאלה בפועל, אתם עשויים להיפגש לעתים רחוקות. מדובר בעיקר במכונות בעלות הספק נמוך המשמשות לאוטומציה.

היקף היישום
מנועים סינכרוניים יקרים יותר מאסינכרוני, בנוסף הם דורשים מקור נוסף לעירור זרם ישר - זה מקטין בחלקו את רוחב היקף המכונות החשמליות מסוג זה. עם זאת, מנועים חשמליים סינכרוניים משמשים להנעת מנגנונים בהם עומס יתר אפשרי ונדרשת תחזוקה מדויקת של סיבובים יציבים.

יתר על כן, הם משמשים לרוב בתחום הקיבולות הגדולות - מאות קילוואט ויחידות של מגה-וואט, ובאותו הזמן, התחלה ועצירה נדירות למדי, כלומר המכונות עובדות מסביב לשעון במשך זמן רב. יישום זה נובע מהעובדה שמכונות סינכרוניות פועלות עם cos и phi קרוב ל 1 ויכולות לספק כוח תגובתי לרשת, מה שמשפר את גורם ההספק של הרשת ומקטין את הצריכה שלה, מה שחשוב עבור ארגונים.
יתרונות וחסרונות
במילים פשוטות, אז לכל מכונית חשמלית יש את היתרונות והחסרונות שלה. היתרונות של מנוע סינכרוני הם:
- עבודה עם cosPhI = 1, בגלל עירור זרם ישיר בהתאמה, הם אינם צורכים כוח תגובתי מהרשת.
- במהלך הפעולה, תוך התרגשות יתר, הם נותנים כוח תגובתי לרשת, משפרים את גורם ההספק של הרשת, את ירידת המתח וההפסדים בה וגודל ה- CM של גנרטורים של תחנות כוח עולה.
- הרגע המקסימאלי שפותח על ציר ה- LED הוא פרופורציונלי ל- U, ולגבי ה- AD - U² (תלות ריבועית במתח). המשמעות היא שלנורת לד קיבולת עומס ויציבות טובה, הנשמרים במהלך ירידת מתח ברשת.
- כתוצאה מכל זה, מהירות הסיבוב יציבה במהלך עומסי יתר ושקיעה, בתוך כושר העומס יתר, במיוחד עם הגדלת זרם העירור.
עם זאת, החיסרון המשמעותי של מנוע סינכרוני הוא שעיצובו מסובך יותר מזה של אסינכרוני עם רוטור קצר מעגל: דרוש מעורר, שבלעדיו הוא לא יכול לעבוד. כל זה מוביל לעלות גבוהה יותר בהשוואה למכונות אסינכרוניות וקשיי תחזוקה ותפעול.
אולי היתרונות והחסרונות של מנועים סינכרוניים מסתיימים שם. במאמר זה ניסינו לסכם מידע כללי על מנועים סינכרוניים. אם יש לך משהו להוסיף את החומר - כתוב בתגובות.
חומרים קשורים: