מהו מנוע קומוטטור DC ואיך זה עובד
מנועי אספן נפוצים למדי בחיי היומיום ובייצור. הם משמשים להנעת מנגנונים שונים, כלי חשמל, במכוניות. חלק מהפופולריות נובעת מההתאמה הפשוטה של מהירות הרוטור, אך יש כמה מגבלות לשימוש בהן וכמובן, חסרונות. בואו נראה איזה מנוע אספן זרם ישר ישיר (KDTT), מהם הזנים של סוג זה של מנוע חשמלי והיכן הם משמשים.
הגדרה ומכשיר
בספריות ובאנציקלופדיות מובילות, הגדרה כזו:
"מנוע אספן נקרא מנוע חשמלי, בו חיישן מיקום הפיר ומתג הפיתולים הם אותו התקן - הקולט. "מנועים כאלה יכולים לפעול רק על זרם ישר או על זרם ישר וישיר."
מנוע אספן, כמו כל אחד אחר, מורכב הרוטור והסטטור. במקרה זה, הרוטור הוא עוגן. נזכיר כי העוגן הוא החלק של המכונה החשמלית הצורכת את הזרם העיקרי, ובו נוצר כוח האלקטרומוטי.

מדוע זה נחוץ וכיצד מסודרים האספן? האספן ממוקם על הציר (הרוטור), ומהווה קבוצה של צלחות הממוקמות באורך מבודד מהפיר ומאלה. הם נקראים למללות. כיפופי קטעי רוליות הארמטורה מחוברים למלמות (ניתן לראות את מכשיר התפתל העוגן של KDPT בקבוצת הדמויות למטה), או ליתר דיוק, סוף הקודם ותחילת הקטע המתפתל הבא מחוברים לכל אחד מהם.

זרם מסופק לפיתולי דרך המברשות. המברשות יוצרים קשר הזזה ובמהלך סיבוב המוט נמצאים במגע עם למלה זו או אחרת. לפיכך, מתפתלים פיתולי הנורה, לשם כך יש צורך באספן.
מכלול המברשות מורכב מסוגר עם מחזיקי מברשות, ומותקנים ישירות בתוכו מברשות גרפיט או מטלוגרפיט. כדי להבטיח מגע טוב, המברשות נלחצות כנגד הקולט על ידי קפיצים.
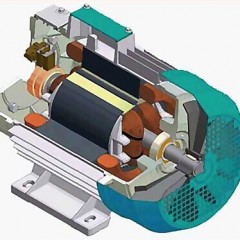
על הסטטור מותקנים מגנטים קבועים או אלקטרומגנטים (סלילת שדה), היוצרים שדה מגנטי סטטורי. בספרות על מכונות חשמליות משתמשים לעתים קרובות יותר במונחים "מערכת מגנטית" או "משרן" במקום המילה "סטטור". באיור שלהלן ניתן לראות את העיצוב של ה- DPT בתחזיות שונות. עכשיו בואו נראה איך עובד מנוע המפלט DC!

עקרון הפעולה
כאשר הזרם זורם דרך מתפתל armature, מופיע שדה מגנטי אשר ניתן לקבוע את כיוונו באמצעות כללי גימלט. השדה המגנטי הקבוע של הסטטור מקיים אינטראקציה עם שדה האזור, והוא מתחיל להסתובב בגלל העובדה שהקטבים בעלי אותו שם דוחים, נמשכים לשונים. מה שממחיש בצורה מושלמת על ידי הדמות למטה.

כאשר המברשות עוברות למללות אחרות, הזרם מתחיל לזרום בכיוון ההפוך (אם ניקח בחשבון את הדוגמה לעיל), הקטבים המגנטיים מחליפים מקומות והתהליך חוזר על עצמו.
במכונות אספן מודרניות לא נעשה שימוש בעיצוב דו קוטבי בגלל סיבוב לא אחיד, ברגע שינוי כיוון הזרם, הכוחות הפועלים על המבנה יהיו מינימליים. ואם תדליק את המנוע, שהציר שלו נעצר במצב "המעבר" הזה - יתכן שהוא לא יתחיל להסתובב כלל. לפיכך, לאספנו של מנוע DC מודרני יש יותר קטבים וקטעי פיתולים משמעותיים המונחים בחריצי הליבה המרופדת, וכך משיגים החלקות אופטימלית של תנועה ומומנט על הפיר.
העיקרון של הפעלת מנוע האספן בשפה פשוטה עבור בובות מתגלה בסרטון הבא, אנו ממליצים בחום לקרוא אותו.
סוגי KDPT ותוכניות חיבור מפותלות
על פי שיטת העירור, מנועי אספן DC הם משני סוגים:
- עם מגנטים קבועים (מנועים בעלי הספק נמוך עם הספק של עשרות ומאות וואט).
- עם אלקטרומגנטים (מכונות חזקות, למשל על מנגנוני הרמה וכלים מכניים).
הבחינו בין סוגים אלה של KDTT בשיטת חיבור הפיתולים:
- עירור רצף (בספרות הרוסית הישנה ומחשמלאים ותיקים אתה יכול לשמוע את השם "סידורי", מהאנגלית. סידורי). כאן, סלילת השדה מחוברת בסדרה עם מתפתלת armature. מומנט התחלה גבוה הוא היתרון של תכנית כזו, וחיסרון שלה הוא ירידה במהירות הסיבוב עם העומס הגובר על הפיר (מאפיין מכני רך), והעובדה שהמנוע רוכל (עלייה בלתי מבוקרת במהירות עם נזק לאחר מכן למסבי הדחף והמשביתה) אם מתבטל או עם עומס פיר של פחות מ 20-30% מהסמל הנומינלי.
- מקביל (נקרא גם "shunt"). בהתאם לכך, סלילת השדה מחוברת במקביל למתפתל armature. במהירויות נמוכות על הפיר, המומנט גבוה ויציב במגוון רחב של סיבובים, ועם עליית המהפכות הוא פוחת. היתרון הוא סיבובים יציבים על פני מגוון רחב של עומס על הפיר (מוגבלת על ידי כוחו), והחיסרון הוא שאם המעגל ישבר במעגל ההתרגשות, הוא יכול להשתבש.
- תלויים. פיתולי שדה ועוגנים מופעלים על ידי מקורות שונים. פיתרון זה מאפשר לך לשלוט בצורה מדויקת יותר על מהירות הפיר. תכונות העבודה דומות ל- DPT עם עירור מקביל.
- מעורב. חלק מתפתל השדה מחובר במקביל, וחלק בסדרה עם המבנה. שלב את היתרונות של סוגים סדרתיים ומקבילים.


הסמל הגרפי בתרשים שתראה למטה.

בספרות רוסית זרה ומודרנית, כמו גם על דיאגרמות, ניתן למצוא ייצוג נוסף של UGO עבור KDT, כפי שהוצג בתמונה הקודמת בצורה של מעגל עם שני ריבועים, שם המעגל מייצג את העוגן ושני ריבועים מייצגים את המברשות.
תרשים חיבור והפוך
תרשים החיבור של פיתולי הסטטור והרוטור נקבע במהלך הייצור, ובהתאם למקום בו משתמשים במנוע מסוים, עליכם לבחור את הפיתרון המתאים. במצבי הפעלה מסוימים (מצב בלם, למשל) ניתן לשנות את מעגלי המיתוג המפותלים או להכניס אלמנטים נוספים.
הם כוללים מנועי אספן DC נמוכים בעלי הספק נמוך באמצעות: מקשי מוליכים למחצה (טרנזיסטורים), מתגים או כפתורים למיתוג, מעגלי מיקרו מיוחדים לנהג, או באמצעות ממסרים בעלי הספק נמוך. מכונות גדולות וחזקות מחוברות לרשת DC דרך דו קוטבית אנשי קשר.
למטה רואים מעגל הפוך לחיבור מנוע DC לרשת 220V. בפועל, המעגל יהיה דומה בייצור, אך לא יהיה בו גשר דיודה, מכיוון שכל הקווים לחיבור מנועים כאלה מונחים מתחנות המתיחה, בהן הזרם החלופי מתוקן.

ההפוך מתבצע על ידי שינוי הקוטביות על שדה מתפתל או על הזרוע. אי אפשר לשנות את הקוטביות גם שם וגם שם, מכיוון שכיוון הסיבוב של הפיר לא ישתנה, כמו שקורה במנועי אספן אוניברסליים כשפועלים על זרם חילופין.
כדי להפעיל בצורה חלקה את המנוע, מכשיר כוונון, למשל, ריאוסטט, מוחדר למעגל אספקת החשמל של מתפתל הארמטורה או מתפתלת הארמטורה ומתפתל התרגשות (תלוי במעגל החיבור שלהם), אך גם מהירות הפיר נשלטת באותו אופן, אך במקום ריאוסטט הם משתמשים לעתים קרובות במערכת נגדים קבועים המחוברים באמצעות קבוצת אנשי קשר.

ביישומים מודרניים משתנה מהירות הסיבוב באמצעות אפנון רוחב דופק (PWM) ומפתח מוליכים למחצה, וזה בדיוק מה שנעשה בכלי חשמל אלחוטי (מברג למשל). היעילות של שיטה זו גבוהה בהרבה.

היקף היישום
מנועי מברשת DC משמשים בכל מקום הן בחיי היומיום והן במכשירים ומנגנונים תעשייתיים, בואו נשקול בקצרה את היקפן:
- במכוניות משמשים DCB אספנים של 12 וולט ו 24 וולט להנעה של להבי מגבים (מגבים לשמשה הקדמית), במעליות החלונות, להפעלת המנוע (המתנע הוא סדרה או מנוע אספן DC מעורב מעורב) וכוננים אחרים.
- במנגנוני הרמה (מנופים, מעליות וכו ') משתמשים KDPT הפועלים על רשת DC עם מתח של 220 וולט או כל מתח זמין אחר.
- בצעצועים לילדים ובדגמים מבוקרי רדיו בעלי עוצמה נמוכה משתמשים KDTT עם רוטור לשלושה מוטים ומגנטים קבועים על הסטטור.
- בכלי חשמל אלחוטי ידני - מגוון מקדחים, מטחנות, מברגים חשמליים וכו '.
שימו לב שכלי חשמל מודרני ויקר מותקנים מנועים ללא מברשות, אך מנועים ללא מברשות.
יתרונות וחסרונות
בואו ננתח את היתרונות והחסרונות של מנוע אספן DC. יתרונות:
- היחס בין הגודל לעוצמה (מדדי משקל וגודל).
- פשטות התאמת פניות ויישום התחלה רכה.
- רגע התחלה.
החסרונות של KDPT הם כדלקמן:
- מברשות שחוקות. מנועים עמוסים במיוחד המשמשים באופן קבוע דורשים בדיקה קבועה, החלפת מברשות ותחזוקה של מכלול סעפת.
- האספן מתבלה בגלל חיכוך המברשות.
- ניצוץ מברשת אפשרי, שמגביל את השימוש במקומות מסוכנים (לאחר מכן השתמש בביצוע KDTT מוגן פיצוץ).
- בגלל מיתוג מתמיד של הסיבובים, סוג זה של מנוע DC מכניס הפרעה ועיוות למעגל האספקה או לרשת החשמל, מה שמוביל לתקלות ובעיות בהפעלת אלמנטים מעגליים אחרים (רלוונטיים במיוחד למעגלים אלקטרוניים).
- עם מגנטים מגנטיים קבועים, הכוחות המגנטיים נחלשים (מתייבשים) לאורך זמן ויעילות המנוע פוחתת.
אז בחנו מהו מנוע אספן זרם ישר, כיצד הוא מתוכנן ומהו עיקרון ההפעלה שלו. אם יש לך שאלות, שאל אותם בתגובות תחת המאמר!
חומרים קשורים: