מהו מנוע אינדוקציה ואיך זה עובד
מנוע האינדוקציה פשוט ואמין וזו הסיבה שהוא משמש לעתים קרובות מאוד בייצור ובמכשירים ביתיים, מהנעה השסתום וכלה בסיבוב התוף במכונת הכביסה. במאמר זה נספר במילים פשוטות אודות מהם מנועים חשמליים אסינכרוניים, מה זה ואיך פועלות מכונות חשמליות מסוג זה.
מינים
מנועי אינדוקציה (AM) מחולקים לשתי קבוצות עיקריות:
- רוטור כלוב הסנאי
- עם רוטור פאזה.
אם נשמיט את הניואנסים, ההבדל הוא שלמנוע הרוטור של כלוב הסנאי אין מכחולים ומפותלות בולטות, הוא פחות תובעני בתחזוקה. ואילו במנועים אסינכרוניים עם רוטור פאזה ישנם שלושה פיתולים המחוברים לטבעות החלקה, הזרם ממנו מוסר באמצעות מברשות. שלא כמו הקודם, עדיף לשלוט על מומנט המוט וקל יותר לממש התחלה חלקה להפחתת זרמי ההפעלה.
שאר המנועים מסווגים:
- לפי מספר שלבי האספקה - חד-פאזיים ושניים-פאזיים (המשמשים בחיי היומיום כשהם מופעלים על ידי רשת 220 וולט), ושלושה-פאזיים (הנפוצים ביותר בייצור ובסדנאות).
- בדרך לחיזוק - אוגן או על כפות.
- על ידי מצב פעולה - למצב ארוך טווח, קצר טווח או שוב ושוב.
ועוד מספר גורמים המשפיעים על בחירת מוצר מסוים לשימוש בתנאים ספציפיים.
ניתן לומר רבות על מנועים חשמליים חד פאזיים: חלקם משוגרים דרך קבל, וחלקם דורשים יכולת התחלה ועבודה. ישנן גם אפשרויות עם פנייה קצרת מעגל, העובדות ללא קבל ומשמשות, למשל, במכסים. אם אתם מעוניינים, כתבו בתגובות ואנחנו נכתוב עליה מאמר.
מכשיר
בהגדרה, "אסינכרוני" מתייחס למנוע AC בו הרוטור מסתובב לאט יותר מהשדה המגנטי של הסטטור, כלומר באופן אסינכרוני. אולם ההגדרה הזו איננה אינפורמטיבית מדי. כדי להבין זאת, עליכם להבין כיצד מתוכנן המנוע הזה.
מנוע אינדוקציה, כמו כל אחד אחר, מורכב משני חלקים עיקריים - הרוטור והסטטור. "לדומיות" בתחום האלקטרוניקה אנו מפענחים:
- הסטטור נקרא החלק הקבוע של כל גנרטור או מנוע חשמלי.
- הרוטור נקרא החלק המסתובב של המנוע, המניע את המנגנונים.

הסטטור מורכב מבית, שקצותיו סגורים על ידי מגני מיסב בהם מותקנים המסבים. בהתאם למטרה ולעוצמת המנוע, משתמשים במיסבים זזים או מתגלגלים. הליבה ממוקמת במקרה, מותקן עליו פיתול. זה נקרא סטטור מתפתל.

מכיוון שהזרם מתחלף להפחתת הפסדים כתוצאה מזרמים תועים (זרמי פוקו) ליבת הסטטור נשאבת מלוחות פלדה דקיקים שמבודדים זה מזה בקנה מידה ומלוכסים בלכה.מתח אספקה מועבר לסיבובי הסטטור, הזרם הזורם בתוכם נקרא זרם הסטטור.
מספר הפיתולים תלוי במספר שלבי האספקה ובעיצוב המנוע. כך שלמנוע תלת פאזי יש לפחות שלושה פיתולים המחוברים על ידי מעגל כוכב או משולש. המספר שלהם עשוי להיות גדול יותר, וזה משפיע על מהירות סיבוב הפיר, אבל נדבר על זה בהמשך.
אבל עם הרוטור, הדברים מעניינים יותר, כאמור, זה יכול להיות קצר או מעגל.

רוטור כלוב סנאי הוא קבוצה של מוטות מתכת (בדרך כלל אלומיניום או נחושת), באיור שלמעלה הם מסומנים על ידי המספר 2, מולחמים או ממולאים לליבה (1), סגורים על ידי טבעות (3). עיצוב זה דומה לגלגל בו פועלים מכרסמים מבויתים, וזו הסיבה שהוא מכונה לעתים קרובות "כלוב הסנאי" או "גלגל הסנאי" ושם זה אינו סלנג, אלא ספרותי למדי. כדי להפחית את ההרמוניות הגבוהות יותר של ה- EMF ואת פעימת השדה המגנטי, מוטות המוטות לא לאורך הפיר, אלא בזווית מסוימת יחסית לציר הסיבוב.
רוטור הפאזה שונה מקודמו בכך שיש לו כבר שלוש פיתולים, כמו על סטטור. תחילת הפיתולים מחוברים לטבעות, בדרך כלל נחושת, הם נלחצים על ציר המנוע. בהמשך נסביר בקצרה מדוע הם נחוצים.

בשני המקרים, אחד מקצות המוט מחובר למנגנון המונע על ידי תנועה, הוא בצורה חרוטית או גלילית עם או בלי חריצים להתקנת אוגן, גלגלת וחלקי הנעה מכניים אחרים.
על המוט "האחורי" של המוט קבוע מדחף, הכרחי לנשיפה וקירור, על מעטפתו מונחת מעטפת על גבי המדחף. לפיכך, אוויר קר מופנה בשולי מנוע האינדוקציה, אם האימפלר הזה לא מסתובב מסיבה כלשהי, הוא יחמם יתר על המידה.

התכנון של מנוע האינדוקציה הראשון פותח על ידי M.O. דוליבו-דוברובולסקי והוא רשם פטנט בשנת 1889. ללא שינויים הוא שרד עד היום.
עקרון עבודה
מכונות חשמליות אסינכרוניות נקראות לרוב אינדוקציה, זה נובע מעיקרון הפעולה שלהן. כל מנוע חשמלי מונע לסיבוב כתוצאה מאינטראקציה בין השדות המגנטיים של הרוטור והסטטור, כמו גם בגלל כוח האמפר. שדה מגנטי, בתורו, יכול להתקיים סביב מגנט קבוע, או סביב מוליך דרכו זורם זרם. אבל איך בדיוק עובדת מכונה אסינכרונית?
במנוע אינדוקציה, שלא כמו אחרים, אין עירור מתפתל כשלעצמו, ואילו יש לו שדה מגנטי? התשובה היא פשוטה: מנוע אינדוקציה הוא שנאי.
שקול את העיקרון של פעולתו בדוגמה של מכונה תלת פאזית, מכיוון שהם נמצאים לעתים קרובות יותר מאחרים.
באיור שלמטה רואים את מיקום הפיתולים על ליבת הסטטור של מנוע אסינכרוני תלת פאזי.

כתוצאה מזרימת זרם תלת פאזי מופיע שדה מגנטי מסתובב בתוך פיתולי הסטטור. בגלל מעבר הבמה, הזרם זורם מתפתל זה או אחר, ובהתאם לכך יש שדה מגנטי, שהקטבים שלו מכוונים לפי הכלל של יד ימין. ובהתאם לשינוי בזרם במפתול כזה או אחר, הקטבים נשלחים לכיוון המקביל. כפי שממחישה האנימציה הבאה:

במקרה הפשוט ביותר (דו-קוטבי), הפיתולים נערמים בצורה כזו שכל אחד מהם מתקזז ב -120 מעלות ביחס לקודם, וכך גם זווית הפאזה של המתח ברשת AC.
מהירות הסיבוב של השדה המגנטי של הסטטור נקראת סינכרוני. למידע נוסף על האופן בו הוא מסתובב ומדוע תלמד מהסרטון הבא. שימו לב שבמנוע דו-פאזי (קבלים) ומנועים חד פאזיים - הוא אינו מסתובב, אלא אליפטי או פועם, והפיתולים אינם 3, אלא 2.
אם ניקח בחשבון מנוע חשמלי אסינכרוני עם רוטור כלוב הסנאי, השדה המגנטי של הסטטור גורם EMF למוטות שלו, מכיוון שהם סגורים, אז זורם זרם.בגלל זה, מתרחש גם שדה מגנטי.
כתוצאה מאינטראקציה של שני תחומים ו- כוח אמפרהפועל על הרוטור, הוא מתחיל להסתובב אחרי השדה המגנטי של הסטטור המסתובב, אך יחד עם זאת תמיד מפגר מעט מאחורי המהירות הסיבובית של הסטטור MP, פיגור זה נקרא החלקה.
אם מהירות הסיבוב של השדה המגנטי נקראת סינכרוני, אז מהירות הסיבוב של הרוטור כבר אסינכרונית, שממנה הוא קיבל שם זה.
ב- AD עם רוטור פאזה הדברים דומים, למעט העובדה שרוסטט מחובר לטבעות שלו, שאחרי שהמנוע נכנס למצב ההפעלה, הוא מוצא מהמעגל והפיתולים קצרים למעגל. זה מוצג בתרשים למטה, אך במקום ריאוסטט, נגדים קבועים משמשים, מחוברים או מכווננים על ידי אנשי קשר KM3, KM2, KM1.
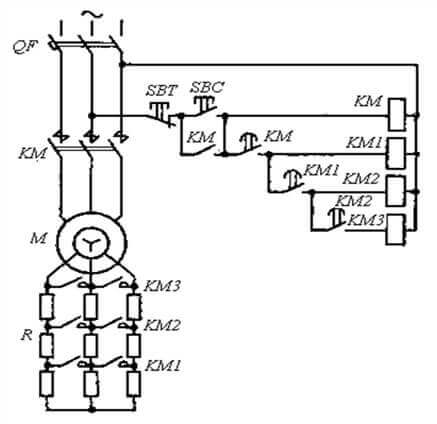
גישה זו מאפשרת התחלה חלקה והפחתת זרמי ההמאה, על ידי הגברת ההתנגדות החשמלית הפעילה של הרוטור.
 לסיכום:
לסיכום:
- הזרם בכפתורי הסטטור מייצר שדה מגנטי.
- השדה המגנטי מוביל לזרם ברוטור.
- הזרם ברוטור מוביל להופעת שדה סביבו.
- מכיוון ששדה הסטטור מסתובב, בגלל השדה שלו, הרוטור מתחיל להסתובב מאחוריו.
מהירות החלקה וסיבוב
תדר הסיבוב של השדה המגנטי של הסטטור (n1) גדול מתדר הסיבוב של הרוטור (n2). ההבדל ביניהם נקרא slip, ומסומן על ידי האות הלטינית S ומחושב על ידי הנוסחה:
S = (n1-n2) * 100% / n1
הזזה אינה מגרעת של מנוע חשמלי זה, מכיוון שאם הפיר שלו יסתובב באותה תדר כמו השדה המגנטי של הסטטור (באופן סינכרוני), אז לא ייווצר זרם במוטות שלו, והוא פשוט לא יסתובב.
עכשיו לגבי מושג חשוב יותר - מהירות הסיבוב של הרוטור של מנוע אינדוקציה. זה תלוי בשלושה ערכים:
- תדר מתח אספקה (ו);
- מספר זוגות הקטבים המגנטיים (p);
- להחליק (S).
מספר זוגות הקטבים המגנטיים קובע את מהירות הסיבוב הסינכרונית של השדה ותלוי במספר פיתולי הסטטור. הזזה תלויה בעומס ובעיצוב של מנוע חשמלי מסוים ונמצאת בטווח של 3-10%, כלומר המהירות האסינכרונית מעט פחותה מהסינכרונית. ובכן, תדירות הזרם החלופי קבועה על 50 הרץ.
לכן, מהירות הסיבוב של המנוע של מנוע אינדוקציה קשה לוויסות, אתה יכול רק להשפיע על תדירות החשמל, כלומר על ידי הגדרה ממיר תדרים. אפשר להוריד את מתח הסטטור, אבל אז ההספק על הפיר יורד, בכל זאת, משתמשים בטכניקה כזו כשמתחילים את ה- AM בהעברת הסיבוב מכוכב לדלתא כדי להפחית את זרמי ההתחלה.
תדירות הסיבוב של שדה הסטטור (מהירות סינכרונית) נקבעת על ידי הנוסחה:
n = 60 * f / p
אז במנוע עם זוג קטבים מגנטיים (שני קטבים) המהירות הסינכרונית היא:
60 * 50/1 = 3000 סל"ד
האפשרויות הנפוצות ביותר למנועים חשמליים עם:
- זוג קטבים (3000 סל"ד);
- שניים (1500 סל"ד);
- שלוש (1000 סל"ד);
- ארבע (750 סל"ד).
מהירות הרוטור בפועל תהיה מעט נמוכה יותר, על מנוע אינדוקציה אמיתי זה מצוין על לוחית השלט, למשל, כאן - 2730 סל"ד. למרות זאת, האנשים יתקשרו למנוע אסינכרוני כזה לפי המהירות הסינכרונית או פשוט "שלושת אלפים מטר".

ואז החלק שלה שווה:
3000-2730*100%/3000=9%
היקף היישום
מנוע חשמלי אסינכרוני מצא יישום בכל תחומי הפעילות האנושית. אלה המופעלים משלב אחד (מ- 220V) ניתן למצוא במפעילים בעלי עוצמה נמוכה או במכשירים וכלים ביתיים, למשל:
- במכונת כביסה מסוג "התינוק" ובדגמים סובייטים ישנים אחרים;
- במערבל בטון;
- במאוורר;
- במכסה המנוע;
- ואפילו במכסחות דשא של פלח המחירים העליון.



בייצור ברשתות תלת פאזיות:
- שסתומי שער אוטומטיים;
- מנגנוני הרמה (מנופים וכננות);
- אוורור
- מדחסים;
- משאבות
- מכונות לעיבוד עץ ומתכת ועוד.




AD משמשת גם לרכבים חשמליים, ולאחרונה מפרסמים באופן פעיל המנוע האסינכרוני עם סוג סלוויאנקה והגלגל המנועי Duyunov באופן פעיל באינטרנט, אותו תוכלו לדעת מהסרטון של היזם.
היקף המנועים האסינכרוניים הוא כה גדול עד שהרשימה לבדה תהיה ארוכה יותר ממאמר זה, ולכן כל חשמלאי צריך לדעת איך הוא עובד, למה הוא מיועד ואיפה הוא משמש. לסיכום ורשימה של היתרונות והחסרונות של מכשירים אלה.
יתרונות:
- בנייה פשוטה.
- עלות נמוכה
- כמעט ללא תחזוקה.
החיסרון העיקרי הוא הקושי להתאים את המהירות בהשוואה לאותם מנועי DC או מכונות אספן אוניברסליות. בהתאם לכך, קשה לארגן הפעלה חלקה של מכונות גדולות, ולעתים קרובות יותר הדבר נעשה בעזרת ממיר תדרים יקר.
כאן אנו מסתיימים בשיקול של מנועי אינדוקציה והיקפם. אנו מקווים שאחרי שתקראו את המאמר תוכלו להבין מה זה ואיך עובדת המכונה החשמלית הזו!
חומרים קשורים:




