Che cos'è un motore sincrono e dove viene utilizzato
I motori elettrici sincroni (SD) non sono così comuni come i motori asincroni a gabbia di scoiattolo. Ma vengono utilizzati laddove è necessaria una coppia elevata e durante il lavoro frequenti sovraccarico. Inoltre, questo tipo di motore viene utilizzato dove è necessaria una grande potenza per guidare i meccanismi, a causa dell'elevato fattore di potenza e della capacità di migliorare il fattore di potenza della rete, che ridurrà significativamente il costo dell'elettricità e del carico sulla linea. Che cos'è un motore sincrono, dove viene utilizzato e quali sono i suoi pro e contro che considereremo in questo articolo.
Definizione e principio di azione
In termini semplici, un motore sincrono è chiamato motore elettrico in cui la velocità di rotazione del rotore (albero) coincide con la velocità di rotazione del campo magnetico dello statore.
Consideriamo brevemente il principio di funzionamento di un tale motore elettrico: si basa sull'interazione di un campo magnetico statore rotante, che di solito viene creato da una corrente alternata trifase e un campo magnetico costante del rotore.
Il campo magnetico costante del rotore viene creato dall'avvolgimento di eccitazione o dai magneti permanenti. La corrente negli avvolgimenti dello statore crea un campo magnetico rotante, mentre il rotore in modalità operativa è un magnete permanente, i suoi poli corrono ai poli opposti del campo magnetico dello statore. Di conseguenza, il rotore ruota in modo sincrono con il campo dello statore, che è la sua caratteristica principale.
Ricordalo motore a induzione la velocità di rotazione dello statore MP e la velocità di rotazione del rotore differiscono per la quantità di slittamento e la sua caratteristica meccanica viene "gobbata" con un picco durante lo slittamento critico (al di sotto della sua velocità di rotazione nominale).
La velocità con cui ruota il campo magnetico dello statore può essere calcolata usando la seguente equazione:
N = 60f / p
f è la frequenza della corrente nell'avvolgimento, Hz, p è il numero di coppie di poli.
Di conseguenza, la velocità di rotazione dell'albero motore sincrono è determinata dalla stessa formula.
La maggior parte dei motori elettrici CA utilizzati nella produzione sono realizzati senza magneti permanenti, ma con un avvolgimento di eccitazione, mentre i motori CA sincroni a bassa potenza sono realizzati con magneti permanenti sul rotore.
La corrente per l'avvolgimento di campo è fornita da anelli e un gruppo spazzole. A differenza di un motore elettrico da collettore, in cui un collettore (un insieme di piastre disposte longitudinalmente) viene utilizzato per trasmettere corrente a una bobina rotante, gli anelli sono montati sul sincrono attraverso un'estremità dello statore.
Gli eccitatori a tiristori, spesso chiamati "VTE" (con il nome di una delle serie di tali dispositivi di produzione domestica) sono attualmente la fonte di eccitazione a corrente continua.In precedenza, veniva utilizzato il sistema di eccitazione generatore-motore, quando un generatore veniva installato sullo stesso albero con il motore (è anche un eccitatore), che resistenze corrente applicata all'avvolgimento di campo.
Il rotore di quasi tutti i motori sincroni a corrente continua viene eseguito senza un avvolgimento di eccitazione e con magneti permanenti, sebbene siano simili in linea di principio ai LED CA, sono molto diversi in termini di modalità di connessione e controllo dalle classiche macchine trifase.
Una delle caratteristiche principali di un motore elettrico è una caratteristica meccanica. Ha motori sincroni vicini a una linea orizzontale diritta. Ciò significa che il carico sull'albero non influisce sulla sua velocità (fino a quando non raggiunge un valore critico).
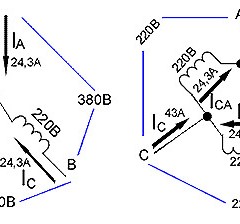
 motori sincroni eb) sincroni")
Ciò si ottiene proprio grazie all'eccitazione di corrente continua, motivo per cui il motore elettrico sincrono mantiene perfettamente i giri costanti in caso di variazioni di carichi, sovraccarichi e cadute di tensione (fino a un certo limite).
Sotto vedi il simbolo sul diagramma della macchina sincrona.

Design del rotore
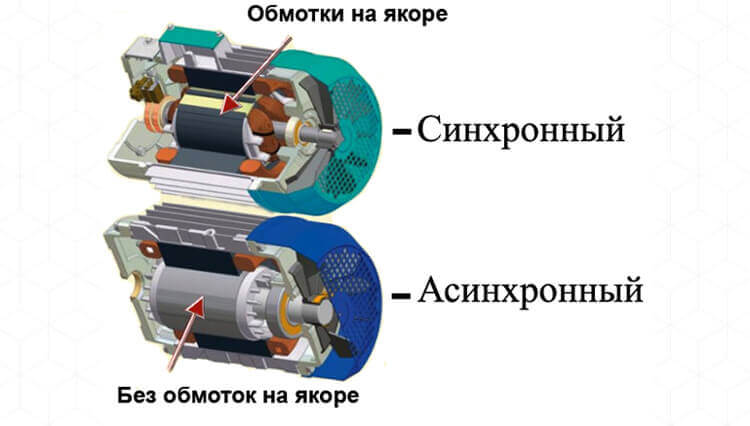
Come ogni altro, un motore elettrico sincrono è costituito da due parti principali:
- Statore. Gli avvolgimenti si trovano in esso. Si chiama anche un'ancora.
- Rotor. Magneti permanenti o un avvolgimento di eccitazione sono installati su di esso. È anche chiamato un induttore, a causa del suo scopo: creare un campo magnetico).
Per fornire corrente all'avvolgimento di campo, sul rotore sono installati 2 anelli (poiché l'eccitazione è corrente continua, "+" viene fornito a uno di essi e "-" all'altro). Le spazzole sono attaccate al portaspazzole.

I rotori dei motori CA sincroni sono di due tipi, a seconda dello scopo:
- Esplicitamente polare. I poli (bobine) sono chiaramente visibili. Utilizzare a basse velocità e un gran numero di poli.
- Implicito: sembra un bianco rotondo, nella fessura su cui sono posati i fili degli avvolgimenti. Utilizzare ad alte velocità di rotazione (3000, 1500 rpm) e un numero limitato di poli.

Avvio motore sincrono
Una caratteristica di questo tipo di macchine elettriche è che non può semplicemente essere collegato alla rete e in attesa del suo lancio. Inoltre, per il funzionamento del LED, non è necessaria solo la sorgente della corrente di eccitazione, ma ha anche un circuito di avviamento piuttosto complicato.

L'avviamento avviene come in un motore a induzione e per creare un momento di avvio, oltre all'avvolgimento di campo, sul rotore viene posizionato un avvolgimento aggiuntivo a "gabbia di scoiattolo" in cortocircuito. È anche chiamato un avvolgimento "smorzante", perché aumenta la stabilità durante sovraccarichi improvvisi.
La corrente di eccitazione nell'avvolgimento del rotore all'avvio è assente e quando accelera fino a una velocità sub-sincrona (3-5% in meno rispetto alla sincrona), viene applicata la corrente di eccitazione, dopo di che oscilla la corrente dello statore e il motore entra in modalità di funzionamento.
Per limitare le correnti di avviamento di macchine potenti, a volte riducono la tensione ai terminali degli avvolgimenti dello statore collegando un autotrasformatore o resistori in serie.
Mentre la macchina sincrona si avvia in modalità asincrona, i resistori sono collegati all'avvolgimento di campo, la cui resistenza supera la resistenza dell'avvolgimento stesso di 5-10 volte. Ciò è necessario in modo che il flusso magnetico pulsante che si manifesta sotto l'azione delle correnti indotte nell'avvolgimento durante l'avviamento non rallenta l'accelerazione e anche per non danneggiare gli avvolgimenti a causa dell'emf indotto in esso.
tipi
Esistono molti tipi di tali macchine, la progettazione di un motore sincrono a corrente alternata con avvolgimenti di eccitazione, come la più comune in produzione, è stata descritta sopra. Esistono altri tipi, come:
- Motori sincroni a magneti permanenti. Questi sono vari motori elettrici, come PMSM - motore sincrono a magneti permanenti, BLDC - Corrente continua senza spazzole e altri. Le differenze tra le quali consistono nel metodo di controllo e nella forma della corrente (sinusoidale o trapezoidale). Sono anche chiamati motori brushless o brushless.Utilizzato in macchine utensili, modelli radiocomandati, elettroutensili, ecc. Non funzionano direttamente dalla corrente continua, ma attraverso un convertitore speciale.
- Motori passo-passo - motori brushless sincroni, in cui il rotore mantiene esattamente la posizione specificata, vengono utilizzati per posizionare l'utensile di lavoro nelle macchine a controllo numerico e per controllare vari elementi di sistemi automatici (ad esempio, la posizione della valvola a farfalla nell'automobile). Sono costituiti da uno statore, in questo caso, gli avvolgimenti di eccitazione si trovano su di esso e un rotore, che è realizzato in materiale magneticamente morbido o magneticamente duro. Strutturalmente molto simile ai tipi precedenti.
- Reattiva.
- Isteresi.
- Isteresi reattiva.
Gli ultimi tre tipi di LED inoltre non hanno spazzole, funzionano a causa del design speciale del rotore. I LED reattivi distinguono tre dei loro design: un rotore stratificato trasversalmente, un rotore con poli distinti e un rotore stratificato assialmente. Una spiegazione del principio del loro lavoro è piuttosto complicata, e richiederà una grande quantità, quindi la ometteremo. Tali motori in pratica, è probabile che si incontrino raramente. Si tratta principalmente di macchine a bassa potenza utilizzate nell'automazione.

Ambito di applicazione
I motori sincroni sono più costosi di quelli asincroni, inoltre richiedono un'ulteriore fonte di eccitazione in corrente continua - questo riduce in parte l'ampiezza dell'ambito di questo tipo di macchine elettriche. Tuttavia, i motori elettrici sincroni vengono utilizzati per azionare meccanismi in cui sono possibili sovraccarichi ed è necessaria una manutenzione precisa dei giri stabili.

Inoltre, vengono spesso utilizzati nel campo di grandi capacità: centinaia di chilowatt e unità di megawatt e, allo stesso tempo, l'avvio e l'arresto sono piuttosto rari, cioè le macchine lavorano tutto il giorno per molto tempo. Questa applicazione è dovuta al fatto che le macchine sincrone funzionano con cos close phi vicino a 1 e possono fornire potenza reattiva alla rete, il che migliora il fattore di potenza della rete e ne riduce i consumi, il che è importante per le imprese.
Vantaggi e svantaggi
In parole semplici, allora ogni auto elettrica ha i suoi pro e contro. I vantaggi di un motore sincrono sono:
- Lavorare con cosPhI = 1, a causa dell'eccitazione di corrente diretta, rispettivamente, non consumano energia reattiva dalla rete.
- Durante il funzionamento, con eccessiva eccitazione, forniscono potenza reattiva alla rete, migliorando il fattore di potenza della rete, la caduta di tensione e le perdite in essa e aumenta il CM dei generatori delle centrali elettriche.
- Il momento massimo sviluppato sull'albero del LED è proporzionale a U e per AD - U² (dipendenza quadratica dalla tensione). Ciò significa che il LED ha una buona capacità di carico e stabilità, che vengono preservate durante una caduta di tensione nella rete.
- Di conseguenza, la velocità di rotazione è stabile durante i sovraccarichi e la subsidenza, all'interno della capacità di sovraccarico, in particolare con l'aumento della corrente di eccitazione.
Tuttavia, uno svantaggio significativo di un motore sincrono è che il suo design è più complicato di quello di un asincrono con un rotore di cortocircuito, è necessario un eccitatore, senza il quale non può funzionare. Tutto ciò comporta costi più elevati rispetto alle macchine asincrone e difficoltà di manutenzione e funzionamento.
Forse i vantaggi e gli svantaggi dei motori sincroni finiscono qui. In questo articolo, abbiamo cercato di riassumere le informazioni generali sui motori sincroni. Se hai qualcosa da integrare nel materiale, scrivi nei commenti.
Materiali correlati: