Was ist ein bürstenloser Gleichstrommotor, wie ist er gebaut und läuft?
Definition
Ein bürstenloser Gleichstrommotor wird als Gleichstrommotor bezeichnet, dessen Strom in den Wicklungen von einer speziellen Schaltvorrichtung geschaltet wird. Er wird als "Treiber" oder "Wechselrichter" bezeichnet und diese Wicklungen befinden sich immer am Stator. Der Schalter besteht aus 6 Transistoren, die je nach Position des Rotors eine bestimmte Wicklung mit Strom versorgen.
In der heimischen Literatur werden solche Motoren als "Ventil" bezeichnet (weil Halbleiterschalter als "Ventile" bezeichnet werden), und es gibt eine Trennung solcher elektrischer Maschinen in zwei Typen in Form von Gegen-EMK. In der ausländischen Literatur besteht ein solcher Unterschied fort, einer von ihnen wird analog zum russischen „BLDC“ (bürstenloser Gleichstromantrieb oder Motor) genannt, der buchstäblich wie ein „bürstenloser Gleichstrommotor“ in ihren Wicklungen klingt, bei dem eine trapezförmige EMF auftritt. Ventilmotoren mit einer sinusförmigen EMK werden als PMSM (Permanentmagnet-Synchronmaschine) bezeichnet, was übersetzt "synchroner Elektromotor mit Erregung durch Permanentmagnete" bedeutet.
Das Gerät und Funktionsprinzip
Der Kollektor im KDPT dient als Knoten zum Schalten des Stroms in den Ankerwicklungen. In einem bürstenlosen Gleichstrommotor (BDT) spielen Lamellenbürsten diese Rolle nicht, sondern deren Kommutator durch Halbleiterschalter - Transistoren. Transistoren schalten die Statorwicklungen und erzeugen ein rotierendes Magnetfeld, das mit dem Rotormagnetfeld interagiert. Und wenn Strom durch einen Leiter fließt, der sich in einem Magnetfeld befindet, wirkt er darauf ein Ampere KraftAufgrund der Wirkung dieser Kraft wird ein Drehmoment auf der Welle elektrischer Maschinen erzeugt. Darauf basiert das Funktionsprinzip eines Elektromotors.
 und des bürstenlosen Motors (rechts)")
Lassen Sie uns nun herausfinden, wie der bürstenlose Motor funktioniert. Normalerweise befinden sich 3 Wicklungen am BDPT-Stator. In Analogie zu Wechselstrommotoren werden sie häufig als dreiphasig bezeichnet. Dies ist teilweise richtig: Bürstenlose Motoren werden von einer Gleichstromquelle (häufig aus Batterien) angetrieben, aber die Steuerung schaltet die Wicklungen abwechselnd ein. Es ist jedoch nicht ganz richtig zu sagen, dass Wechselstrom durch die Wicklungen fließt. Die endgültige Form der Versorgungsspannungswicklung wird durch rechteckige Transistorsteuerimpulse gebildet.
Ein bürstenloser Dreiphasenmotor kann ein Drei- oder Vierdrahtmotor sein, wobei der vierte Draht ein Abgriff vom Mittelpunkt ist (wenn die Wicklungen entlang angeschlossen sind Sternchenmuster).

Wicklungen oder, in einfachen Worten, Spulen aus Kupferdraht passen in die Zähne des Statorkerns. Je nach Ausführung und Zweck des Antriebs kann der Stator eine unterschiedliche Anzahl von Zähnen aufweisen. Es gibt verschiedene Möglichkeiten für die Verteilung der Phasenwicklungen entlang der Zähne des Rotors, was in der folgenden Abbildung dargestellt ist.

Die Wicklungen jedes der Zähne innerhalb einer Phase können in Reihe oder parallel geschaltet werden, abhängig von den Aufgaben, die dem Konstrukteur in Bezug auf Leistung und Moment des entworfenen Antriebs zugewiesen sind, und die Phasenwicklungen selbst sind nach dem Muster eines Sterns oder eines Dreiecks miteinander verbunden asynchron oder synchron Drehstrommotoren.

Rotorpositionssensoren können im Stator installiert werden. Hallsensoren werden häufig verwendet, sie geben ein Signal an die Steuerung, wenn sie vom Magnetfeld der Rotormagnete beeinflusst werden. Dies ist erforderlich, damit die Steuerung „weiß“, in welcher Position sich der Rotor befindet, und die entsprechenden Wicklungen mit Strom versorgt. Dies ist notwendig, um die Effizienz und Stabilität der Arbeit zu erhöhen und kurz gesagt, um die gesamte mögliche Leistung aus dem Motor herauszuholen. Sensoren installiert normalerweise 3 Stück. Das Vorhandensein von Sensoren erschwert jedoch das Gerät eines bürstenlosen Motors. Sie müssen zusätzliche Kabel für Strom- und Datenleitungen verlegen.

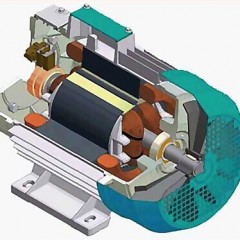
Beim BDTT werden Permanentmagnete, die am Rotor angebracht sind, zur Erregung verwendet, und der Stator ist ein Anker. Denken Sie daran, dass es bei Kollektormaschinen umgekehrt ist (der Rotor ist ein Anker) und zur Erregung in der CD sowohl Permanentmagnete als auch Elektromagnete (Wicklungen) verwendet werden.
Die Magnete sind mit alternierenden Polen montiert, und dementsprechend bestimmt ihre Anzahl die Anzahl der Polpaare. Das heißt aber nicht, wie viele Magnete, dann so viele Polpaare. Mehrere Magnete können einen Pol bilden. Die Anzahl der Umdrehungen pro Minute hängt von der Anzahl der Pole ab, wie dies bei einem Induktionsmotor (und anderen) der Fall ist. Das heißt, von einem Controller mit denselben Einstellungen drehen sich bürstenlose Motoren mit einer unterschiedlichen Anzahl von Polpaaren mit unterschiedlichen Drehzahlen.

Arten von BDTT
Nun wollen wir sehen, wie bürstenlose Permanentmagnetmotoren aussehen. Sie werden durch die Form der Gegen-EMK, das Design sowie durch das Vorhandensein von Rotorpositionssensoren klassifiziert. Es gibt also zwei Haupttypen, die sich in der Form der Gegen-EMK unterscheiden, die in den Wicklungen induziert wird, wenn sich der Rotor dreht:
- BLDC - in ihnen ein trapezförmiger Anti-EMF;
- PMSM - sinusförmig gegen EMK.
Idealerweise benötigen sie unterschiedliche Stromquellen (Controller), in der Praxis sind sie jedoch austauschbar. Wenn Sie jedoch einen Regler mit einer rechteckigen oder trapezförmigen Ausgangsspannung mit einem PMSM-Motor verwenden, hören Sie charakteristische Geräusche, ähnlich einem Klopfen während der Drehung.
Und bürstenlose Gleichstrommotoren sind von Natur aus:
- Mit einem Innenrotor. Dies ist eine bekanntere Darstellung des Elektromotors, wenn der Stator ein Körper ist und sich die darin befindliche Welle dreht. Oft werden sie das englische Wort "Inrunner" genannt. Diese Option wird normalerweise für Hochgeschwindigkeits-Elektromotoren verwendet.
- Mit einem Außenrotor. Hier dreht sich der äußere Teil des Motors mit einer daran befestigten Welle, in englischen Quellen heißt er "Outrunner". Diese Geräteschaltung wird verwendet, wenn Sie einen hohen Moment benötigen.
Das Design hängt davon ab, warum in einer bestimmten Anwendung ein bürstenloser Motor benötigt wird.
 und Outrunner (rechts)")
Die moderne Industrie produziert bürstenlose Motoren mit und ohne Rotorpositionssensoren. Tatsache ist, dass es viele Möglichkeiten gibt, den BDTT zu steuern. Einige von ihnen werden Positionssensoren benötigt, andere bestimmen die Positionen durch EMF in den Wicklungen.Die dritten versorgen einfach die notwendigen Phasen mit Strom, und der Elektromotor synchronisiert sich unabhängig mit dieser Stromversorgung und geht in den Betriebsmodus über.
Hauptmerkmale bürstenloser Gleichstrommotoren:
- Betriebsart - lang oder kurz.
- Maximale Betriebsspannung.
- Maximaler Arbeitsstrom.
- Maximale Leistung.
- Die maximalen Umdrehungen geben häufig nicht Umdrehungen an, sondern KV - r / v, dh die Anzahl der Umdrehungen pro 1 Volt der angelegten Spannung (ohne Belastung der Welle). Um die maximale Geschwindigkeit zu erhalten, multiplizieren Sie diese Zahl mit der maximalen Spannung.
- Der Widerstand der Wicklung (je kleiner sie ist, desto höher ist der Wirkungsgrad) beträgt normalerweise Hundertstel und Tausendstel Ohm.
- Der Phasenvorschubwinkel (Timing) ist die Zeit, nach der der Strom in der Wicklung sein Maximum erreicht. Dies liegt an seiner Induktivität und seinen Schaltgesetzen (der Strom in der Induktivität kann sich nicht sofort ändern.
Schaltplan
Wie oben erwähnt, benötigen Sie für den Betrieb eines bürstenlosen Motors eine spezielle Steuerung. Auf aliexpress finden Sie beide Kits von Motor und Steuerung oder separat. Der Regler wird auch als ESC-Motor oder elektrischer Drehzahlregler bezeichnet. Sie werden durch die Stärke des Stroms ausgewählt, der der Last zugeführt wird.
Normalerweise ist der Anschluss des Elektromotors an die Steuerung unkompliziert und auch für Dummies verständlich. Das Wichtigste, was Sie wissen müssen, ist, dass Sie zum Ändern der Drehrichtung die Verbindung von zwei beliebigen Phasen ändern müssen, und zwar bei dreiphasigen Asynchron- oder Synchronmotoren.

Das Netzwerk verfügt über eine Reihe technischer Lösungen und Schemata, sowohl für komplexe als auch für Dummies, die Sie unten sehen können.
In diesem Video erzählt der Autor, wie man sich mit dem Motor BC "Arduino" anfreundet.
In diesem Video erfahren Sie, wie Sie verschiedene Verbindungen zu verschiedenen Controllern herstellen und wie Sie dies selbst tun können. Der Autor demonstriert dies anhand eines Beispiels für einen Motor von der Festplatte und zwei leistungsstarken Instanzen - Inrunner und Outrunner.
Übrigens wenden wir auch das Diagramm aus dem Video zur Wiederholung an:

Wo bürstenlose Motoren eingesetzt werden
Der Umfang solcher Elektromotoren liegt weit vor dem Zeitplan. Sie werden sowohl zum Antreiben kleiner Mechanismen verwendet: in CD-Laufwerken, DVD-Laufwerken, Festplatten als auch in leistungsstarken Geräten: einer Batterie und einem Elektrowerkzeug (mit einer Stromversorgung von ca. 12 V), funkgesteuerten Modellen (z. B. Quadrocoptern) und CNC-Maschinen zum Antreiben eines Arbeitskörpers (normalerweise Motoren mit einer Nennspannung von 24 V oder 48 V).
BDTTs sind in Elektrofahrzeugen weit verbreitet, fast alle modernen Motorräder von Elektrorollern, Fahrrädern, Motorrädern und Autos sind bürstenlose Motoren. Übrigens liegt die Nennspannung von Elektromotoren für den Transport in einem weiten Bereich, zum Beispiel läuft der Fahrradradmotor oft mit 36 V oder 48 V, mit seltenen Ausnahmen und mehr, und in Autos zum Beispiel mit dem Toyota Prius über 120 V und mit dem Nissan Leaf - kommt auf 400, während es aus einem 220-V-Netzwerk aufgeladen wird (dies wird mit dem eingebauten Konverter implementiert).
Tatsächlich ist der Anwendungsbereich bürstenloser Elektromotoren sehr umfangreich. Das Fehlen eines Kollektorknotens ermöglicht den Einsatz an gefährlichen Orten sowie an Orten mit hoher Luftfeuchtigkeit, ohne dass Kurzschlüsse, Lichtbögen oder Feuer aufgrund von Defekten in der Bürstenbaugruppe befürchtet werden. Aufgrund ihrer hohen Effizienz und guten Gesamtabmessungen haben sie Anwendung in der Raumfahrtindustrie gefunden.
Vor- und Nachteile
Bürstenlose Gleichstrommotoren haben wie andere Arten von elektrischen Maschinen bestimmte Vor- und Nachteile.
Die Vorteile des BDTT sind folgende:
- Dank der Anregung durch leistungsstarke Permanentmagnete (z. B. Neodym) sind sie in Drehmoment und Leistung überlegen und haben kleinere Abmessungen als Induktionsmotoren. Was von den meisten Herstellern von Elektrofahrzeugen verwendet wird - vom Roller bis zum Auto.
- Es gibt keine Funkenbürstenkollektorbaugruppe, die regelmäßig gewartet werden muss.
- Bei Verwendung eines hochwertigen Controllers stören sie im Gegensatz zu derselben CD nicht das Stromversorgungsnetz, was besonders bei funkgesteuerten Geräten und Fahrzeugen mit fortschrittlichen elektronischen Geräten im Bordnetz wichtig ist.
- Wirkungsgrad mehr als 80, häufiger und 90%.
- Hohe Drehzahl, teilweise bis zu 100.000 U / min.
Aber es gibt ein deutliches Minus: Ein bürstenloser Motor ohne Steuerung ist nur ein Stück Eisen mit einer Kupferwicklung. Er wird nicht arbeiten können. Controller sind nicht billig und müssen meistens in Online-Shops oder bei aliexpress bestellt werden. Aus diesem Grund ist die Verwendung von BC-Motoren in selbstgebauten Modellen und Geräten nicht immer möglich.
Jetzt wissen Sie, was ein bürstenloser Gleichstrommotor ist, wie er funktioniert und wo er verwendet wird. Wir hoffen, unser Artikel hat Ihnen geholfen, alle Probleme zu lösen!
Verwandte Materialien:




Schließlich gibt es Menschen, die das Material nicht nur kennen, sondern auch von Gott begabt sind und die Fähigkeit besitzen, es intelligent, verständlich und nicht gelangweilt aufzudecken!
Ich lese wie ein cooler Detektiv!
Vielen Dank an den Autor für den Artikel, jeden Erfolg und alles Gute im Leben!
👍👍👍👍👍👍👍👍👍👍👍👍👍👍
Ich stimme mit allem außer einem überein. Auf dem Prius ist eine reguläre asynchrone 17 kW bei 380V Batterie 288 konstant. Na dann ein bisschen Elektronik und los geht's