Was ist ein Induktionsmotor und wie funktioniert er?
Der Induktionsmotor ist einfach und zuverlässig und wird daher sehr häufig in der Produktion und in Haushaltsgeräten eingesetzt, vom Ventilantrieb bis zur Drehung der Trommel in der Waschmaschine. In diesem Artikel erklären wir Ihnen in einfachen Worten, was asynchrone Elektromotoren sind, was es ist und wie diese Art von elektrischen Maschinen funktioniert.
Spezies
Induktionsmotoren (AM) werden in zwei Hauptgruppen unterteilt:
- Käfigläufer Rotor
- mit einem Phasenrotor.
Wenn wir die Nuancen weglassen, besteht der Unterschied darin, dass der Käfigläufer-Rotormotor keine Bürsten und ausgeprägten Wicklungen aufweist und weniger wartungsintensiv ist. Während bei Asynchronmotoren mit Phasenrotor drei Wicklungen mit Schleifringen verbunden sind, wird der Strom durch Bürsten abgeführt. Im Gegensatz zum vorherigen ist es besser, das Drehmoment auf der Welle zu steuern, und es ist einfacher, einen reibungslosen Start zu erzielen, um die Einschaltströme zu reduzieren.
Der Rest der Motoren klassifiziert:
- nach Anzahl der Versorgungsphasen - einphasig und zweiphasig (im Alltag bei Stromversorgung über ein 220-V-Netz) und dreiphasig (am häufigsten in der Produktion und in Werkstätten).
- durch Befestigung - Flansch oder auf Pfoten.
- nach Betriebsmodus - für einen Langzeit-, Kurzzeit- oder wiederholt Kurzzeitmodus.
Und eine Reihe anderer Faktoren, die die Auswahl eines bestimmten Produkts für die Verwendung unter bestimmten Bedingungen beeinflussen.
Über einphasige Elektromotoren kann viel gesagt werden: Einige von ihnen werden über einen Kondensator gestartet, andere erfordern eine Start- und Arbeitskapazität. Es gibt auch Optionen mit Kurzschluss, die ohne Kondensator arbeiten und beispielsweise in Hauben verwendet werden. Wenn Sie interessiert sind, schreiben Sie in die Kommentare und wir werden einen Artikel darüber schreiben.
Gerät
Per Definition bezieht sich "asynchron" auf einen Wechselstrommotor, bei dem sich der Rotor langsamer dreht als das Magnetfeld des Stators, dh asynchron. Diese Definition ist jedoch nicht zu informativ. Um es zu verstehen, müssen Sie herausfinden, wie dieser Motor konstruiert ist.
Ein Induktionsmotor besteht wie jeder andere aus zwei Hauptteilen - Rotor und Stator. "Für Dummies" in der Elektrik entschlüsseln wir:
- Der Stator wird als fester Bestandteil eines Generators oder Elektromotors bezeichnet.
- Der Rotor wird als rotierender Teil des Motors bezeichnet, der die Mechanismen antreibt.

Der Stator besteht aus einem Gehäuse, dessen Enden durch Lagerschilde verschlossen sind, in die die Lager eingebaut sind. Je nach Verwendungszweck und Leistung des Motors werden Gleit- oder Wälzlager eingesetzt. Der Kern befindet sich im Gehäuse, eine Wicklung ist darauf installiert. Es wird eine Statorwicklung genannt.

Da sich der Strom abwechselt, um Verluste durch Streuströme zu reduzieren (Foucault-Ströme) Der Statorkern wird aus dünnen Stahlplatten gezogen, die durch Zunder voneinander isoliert und mit Lack verklebt sind.Den Statorwicklungen wird eine Versorgungsspannung zugeführt, deren Strom als Statorstrom bezeichnet wird.
Die Anzahl der Wicklungen hängt von der Anzahl der Versorgungsphasen und der Auslegung des Motors ab. Ein Drehstrommotor hat also mindestens drei Wicklungen, die durch eine Stern- oder Dreieckschaltung verbunden sind. Ihre Anzahl kann größer sein und beeinflusst die Drehzahl der Welle, aber wir werden später darüber sprechen.
Aber mit dem Rotor sind die Dinge interessanter, wie bereits erwähnt, es kann entweder kurzgeschlossen oder phasenweise sein.

Ein Käfigläufer ist ein Satz von Metallstäben (normalerweise Aluminium oder Kupfer). In der obigen Abbildung sind sie durch die Nummer 2 gekennzeichnet, die in den Kern (1) gelötet oder eingebettet ist und durch Ringe (3) verschlossen ist. Dieses Design ähnelt einem Rad, in dem domestizierte Nagetiere laufen, weshalb es oft als "Eichhörnchenkäfig" oder "Eichhörnchenrad" bezeichnet wird und dieser Name kein Slang ist, sondern ziemlich literarisch. Um die höheren Harmonischen der EMF und die Pulsation des Magnetfelds zu verringern, werden die Stäbe nicht entlang der Welle, sondern in einem bestimmten Winkel relativ zur Rotationsachse verlegt.
Der Phasenrotor unterscheidet sich vom vorherigen dadurch, dass er wie bei einem Stator bereits drei Wicklungen aufweist. Der Anfang der Wicklungen ist mit den Ringen verbunden, normalerweise Kupfer, sie werden auf die Motorwelle gedrückt. Später werden wir kurz erklären, warum sie benötigt werden.

In beiden Fällen ist eines der Enden der Welle mit einem durch Bewegung angetriebenen Mechanismus verbunden. Es hat eine konische oder zylindrische Form mit oder ohne Nuten, um einen Flansch, eine Riemenscheibe und andere mechanische Antriebsteile zu installieren.
Ein Laufrad, das zum Blasen und Kühlen erforderlich ist, ist am „hinteren“ Teil der Welle befestigt, und ein Gehäuse ist über dem Laufrad auf dem Gehäuse angebracht. Somit wird kalte Luft entlang der Kanten des Induktionsmotors geleitet. Wenn sich dieses Laufrad aus irgendeinem Grund nicht dreht, wird es überhitzt.

Das Design des ersten Induktionsmotors wurde von M.O. Dolivo-Dobrovolsky und er patentierten es 1889. Ohne Änderungen hat es bis heute überlebt.
Arbeitsprinzip
Asynchrone elektrische Maschinen werden oft als Induktion bezeichnet, was auf ihr Funktionsprinzip zurückzuführen ist. Jeder Elektromotor wird aufgrund des Zusammenspiels der Magnetfelder von Rotor und Stator sowie aufgrund der Ampere-Kraft in Rotation versetzt. Ein Magnetfeld kann wiederum entweder um einen Permanentmagneten oder um einen Leiter herum existieren, durch den Strom fließt. Aber wie genau funktioniert eine asynchrone Maschine?
In einem Induktionsmotor gibt es im Gegensatz zu anderen keine Erregerwicklung an sich, wohingegen er ein Magnetfeld hat? Die Antwort ist einfach: Ein Induktionsmotor ist ein Transformator.
Betrachten Sie das Funktionsprinzip am Beispiel einer Dreiphasenmaschine, da diese häufiger als andere zu finden sind.
In der folgenden Abbildung sehen Sie die Position der Wicklungen auf dem Statorkern eines Drehstrom-Asynchronmotors.

Durch den Fluss eines dreiphasigen Stroms tritt in den Statorwicklungen ein rotierendes Magnetfeld auf. Aufgrund der Phasenverschiebung fließt der Strom entweder durch die eine oder die andere Wicklung, entsprechend gibt es ein Magnetfeld, dessen Pole nach der Regel der rechten Hand gerichtet sind. Und entsprechend der Stromänderung in der einen oder anderen Wicklung werden die Pole in die entsprechende Richtung gesendet. Wie die folgende Animation zeigt:

Im einfachsten (zweipoligen) Fall sind die Wicklungen so gestapelt, dass jede von ihnen gegenüber dem vorherigen um 120 Grad versetzt ist, ebenso wie der Phasenwinkel der Spannung im Wechselstromnetz.
Die Drehzahl des Statormagnetfeldes wird als synchron bezeichnet. Erfahren Sie im nächsten Video mehr darüber, wie es sich dreht und warum Sie lernen werden. Beachten Sie, dass bei Zweiphasen- (Kondensator-) und Einphasenmotoren diese nicht rotieren, sondern elliptisch oder pulsierend sind und die Wicklungen nicht 3, sondern 2 sind.
Wenn wir einen asynchronen Elektromotor mit einem Käfigläufer betrachten, induziert das Magnetfeld des Stators eine EMF in seinen Stäben, da diese geschlossen sind, fließt Strom.Aus diesem Grund tritt auch ein Magnetfeld auf.
Infolge des Zusammenspiels zweier Felder und Ampere KraftWenn er auf den Rotor einwirkt, beginnt er sich nach dem rotierenden Statormagnetfeld zu drehen, bleibt aber gleichzeitig immer leicht hinter der Drehzahl des Stators MP zurück. Diese Verzögerung wird als Schlupf bezeichnet.
Wenn die Drehzahl des Magnetfeldes als synchron bezeichnet wird, ist die Drehzahl des Rotors bereits asynchron, von der er diesen Namen erhalten hat.
Bei AD mit einem Phasenrotor sind die Dinge ähnlich, außer dass ein Rheostat mit seinen Ringen verbunden ist, die nach dem Eintritt des Motors in den Betriebsmodus aus dem Stromkreis entfernt werden und die Wicklungen kurzgeschlossen werden. Dies ist in der folgenden Abbildung dargestellt. Anstelle eines Rheostaten werden jedoch konstante Widerstände verwendet, die durch Schütze KM3, KM2, KM1 verbunden oder überbrückt werden.
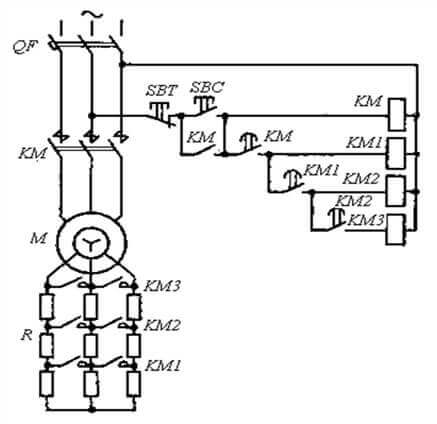
Dieser Ansatz ermöglicht einen reibungslosen Start und reduziert Einschaltströme, indem der aktive elektrische Widerstand des Rotors erhöht wird.
 Zusammenfassend:
Zusammenfassend:
- Der Strom in den Statorwicklungen erzeugt ein Magnetfeld.
- Ein Magnetfeld verursacht Strom im Rotor.
- Der Strom im Rotor führt zum Auftreten eines Feldes um ihn herum.
- Da sich das Statorfeld aufgrund seines Feldes dreht, beginnt sich der Rotor dahinter zu drehen.
Schlupf und Drehzahl
Die Rotationsfrequenz des Statormagnetfeldes (n1) ist größer als die Rotationsfrequenz des Rotors (n2). Der Unterschied zwischen ihnen wird als Schlupf bezeichnet und durch den lateinischen Buchstaben S bezeichnet und durch die Formel berechnet:
S = (n1-n2) * 100% / n1
Das Gleiten ist kein Nachteil dieses Elektromotors, denn wenn sich seine Welle mit der gleichen Frequenz wie das Statormagnetfeld (synchron) dreht, wird in seinen Stäben kein Strom induziert und er dreht sich einfach nicht.
Nun zu einem wichtigeren Konzept - der Drehzahl des Rotors eines Induktionsmotors. Es kommt auf 3 Werte an:
- Versorgungsspannungsfrequenz (f);
- die Anzahl der Magnetpolpaare (p);
- Slip (S).
Die Anzahl der Magnetpolpaare bestimmt die synchrone Drehzahl des Feldes und hängt von der Anzahl der Statorwicklungen ab. Das Gleiten hängt von der Last und dem Design eines bestimmten Elektromotors ab und liegt innerhalb von 3-10%, dh die asynchrone Drehzahl ist geringfügig geringer als die synchrone. Nun, die Frequenz des Wechselstroms ist fest auf 50 Hz eingestellt.
Daher ist die Drehzahl der Welle eines Induktionsmotors schwer zu regeln, Sie können die Frequenz des Netzes nur durch Einstellen beeinflussen ein Frequenzumrichter. Es ist möglich, die Statorspannung zu senken, aber dann nimmt die Leistung auf der Welle ab. Eine solche Technik wird jedoch verwendet, wenn der AM mit dem Umschalten der Wicklungen von Stern auf Dreieck gestartet wird, um die Einschaltströme zu verringern.
Die Rotationsfrequenz des Statorfeldes (Synchrondrehzahl) wird durch die Formel bestimmt:
n = 60 * f / p
Bei einem Motor mit einem Paar Magnetpolen (zwei Polen) beträgt die Synchrondrehzahl also:
60 * 50/1 = 3000 U / min
Die gebräuchlichsten Optionen für Elektromotoren mit:
- ein Polpaar (3000 U / min);
- zwei (1500 U / min);
- drei (1000 U / min);
- vier (750 U / min).
Die tatsächliche Rotordrehzahl ist etwas niedriger, bei einem echten Induktionsmotor ist dies beispielsweise auf dem Typenschild angegeben - 2730 U / min. Trotzdem werden die Leute einen solchen Asynchronmotor entsprechend der Synchrondrehzahl oder einfach „dreitausend Meter“ nennen.

Dann ist sein Schlupf gleich:
3000-2730*100%/3000=9%
Anwendungsbereich
Der asynchrone Elektromotor hat in allen Bereichen der menschlichen Tätigkeit Anwendung gefunden. Diejenigen, die von einer Phase (von 220 V) gespeist werden, können in Aktuatoren mit geringer Leistung oder in Haushaltsgeräten und Werkzeugen gefunden werden, zum Beispiel:
- in einer Waschmaschine vom Typ "Baby" und anderen alten sowjetischen Modellen;
- in einem Betonmischer;
- im Ventilator;
- in der Haube;
- und sogar bei Rasenmähern des oberen Preissegments.



In Produktion in dreiphasigen Netzen:
- automatische Absperrschieber;
- Hebemechanismen (Kräne und Winden);
- Belüftung
- Kompressoren;
- Pumps
- Holz- und Metallbearbeitungsmaschinen und mehr.




AD wird auch in Elektrofahrzeugen verwendet, und kürzlich wurden der Asynchronmotor mit einer Slavyanka-Wicklung und das sogenannte Duyunov-Motorrad im Internet aktiv beworben, was Sie dem Entwicklervideo entnehmen können.
Der Umfang von Asynchronmotoren ist so groß, dass die Liste allein länger als dieser Artikel ist. Daher sollte jeder Elektriker wissen, wie es funktioniert, wofür es ist und wo es verwendet wird. Zusammenfassung und Auflistung der Vor- und Nachteile dieser Geräte.
Vorteile:
- Einfache Konstruktion.
- Niedrige Kosten
- Fast keine Wartung.
Der Hauptnachteil ist die Schwierigkeit beim Einstellen der Drehzahl im Vergleich zu denselben Gleichstrommotoren oder Universalkollektormaschinen. Dementsprechend ist es schwierig, einen reibungslosen Start großer Maschinen zu organisieren, und dies geschieht häufiger mit Hilfe eines teuren Frequenzumrichters.
Hier enden wir mit der Betrachtung der Induktionsmotoren und ihres Umfangs. Wir hoffen, dass Sie nach dem Lesen des Artikels verstehen, was es ist und wie diese elektrische Maschine funktioniert!
Verwandte Materialien:




